
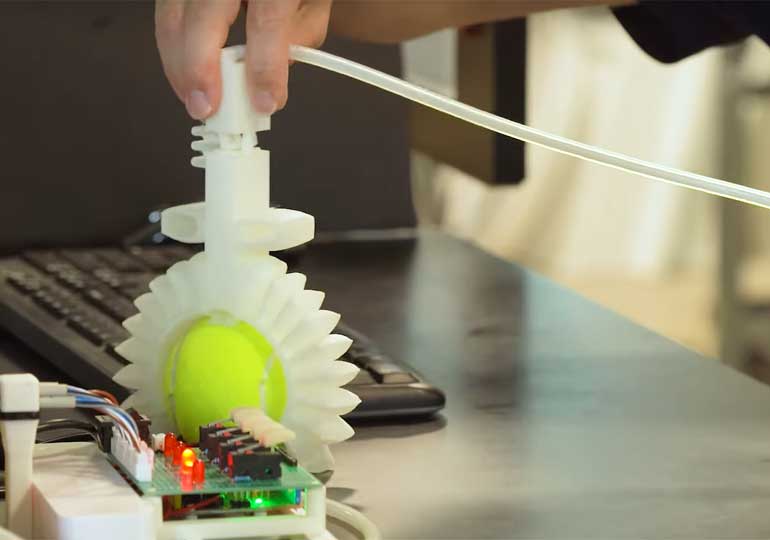
Изследователи от Калифорнийския университет в Сан Диего и BASF създадоха иновативен 3D отпечатан мек роботизиран захващач, който работи без електроника. Тази щипка може да вдига, задържа и освобождава предмети и включва вградени гравитационен и допирен сензор. За разлика от конвенционалните „меки“ роботи, този се отпечатва наведнъж, което елиминира необходимостта от ръчно сглобяване.
Иновативната техника за 3D печат позволява по-тънки стени и по-сложни структури, което води до по-мек и по-устойчив дизайн. Захващачът използва пневматични клапани и канали за управление на сгъстен въздух за работат си. Чрез използването на така наречената „флуидна логика“, захващащото устройство може да запомни кога е хванало обект и да го освободи, когато получи съответния сигнал.
С потенциални приложения в производството, включително и на храни, и в обработката на деликатни предмети, този мек роботизиран захващач представлява значителен напредък в роботиката. Той предлага по-безопасен и по-ефективен начин за взаимодействие на роботите с хората и боравенето с чупливи предмети, пише в представянето на новия продукт Tech Explorist.
Меката роботика има голям потенциал, когато става въпрос за създаване на роботи, които могат да взаимодействат с хора и деликатни предмети, без да ги повреждат.
Въпреки това, производството на устройства, които са меки и здрави, е голямо предизвикателство. Създаването на меки роботи може да бъде сложен и времеемък процес, тъй като повечето от тях се задвижват пневматично и се произвеждат чрез сложни процеси на проектиране, принтиране и сглобяване, които обикновено изискват много ръчни операции и увеличават сложността. Освен това трябва да се добавят сложни контролни компоненти, за да се постигнат дори прости функции.
Сега екип от Калифорнийския университет в Сан Диего, в сътрудничество с изследователи от корпорацията BASF, са разработи мек роботизиран захват, който е 3D отпечатан в една стъпка и също така не се нуждае от електроника, за да работи.
3D отпечатаният роботизиран захват е оборудван с вградени сензори за гравитация и допир и може да взима, задържа и освобождава предмети. Захватът може да се монтира на края на традиционна роботизирана ръка за промишлени или производствени приложения, например в производство на храни, където може да се използва за обработка на плодове и зеленчуци.
Повечето 3D отпечатани меки роботи често имат определена степен на твърдост и са склонни да изпускат захванатия обект, което им пречи да бъдат използвани за много приложения. Освен това те се нуждаят от доста обработка и сглобяване след отпечатване.
Подходът на екипа е да се използва нов метод за 3D печат, който включва дюзата на принтера да проследява непрекъснат път през целия модел на всеки отпечатан слой. Това избягва формирането на каквито и да е дефекти в отпечатката и позволява създаването на по-фини и по-детайлни структури. Методът също така намалява вероятността от течове в отпечатаният детайл, които са много чести при печат с меки материали.
Новият подход позволява отпечатване на тънки стени с дебелина до 0,5 милиметра. По-тънките стени и сложните извити форми позволяват по-висок диапазон на деформация, което води до по-мека структура като цяло.
Освен това процесът на производство не изисква ръчни операции, като сглобяване или настройка. Това означава, че процесът и дизайнът са лесно възпроизводими с помощта на подобен настолен 3D принтер.
Докато захващачът не изисква никакво електричество, за да работи, той трябва да бъде свързан към източник на сгъстен въздух. Той е интегриран с канали и пневматични клапани, които контролират въздушният поток, който задейства гриперът. Серията от клапани позволява на устройството както да захване при контакт с обект, така и да го освободи в точното време.
Когато сензорът за докосване се активира от предмет в челюстите на захващащото устройство, сгъстеният въздух може да влезе във вътрешните канали, за да хване обекта сигурно. Завъртането на ръката в правилната посока активира гравитационния сензор, който освобождава въздушното налягане и кара челюстите да се отварят.
„За първи път такъв грипер може едновременно да захваща и освобождава. Всичко, което трябва да направите, е да го завъртите хоризонтално. Това задейства промяна във въздушния поток в клапаните, което кара двата пръста на захващащия механизъм да се отпуснат“, казва Йъчен Жай, част от екипа.
Тази флуидна логика позволява на робота да запомни кога е хванал обект и се държи за него.
Гриперът може да бъде полезен инструмент за манипулиране с различни приложения като производство и земеделие, както и за изследователски задачи в бъдеще.
*Превод Георги Бурнаски







